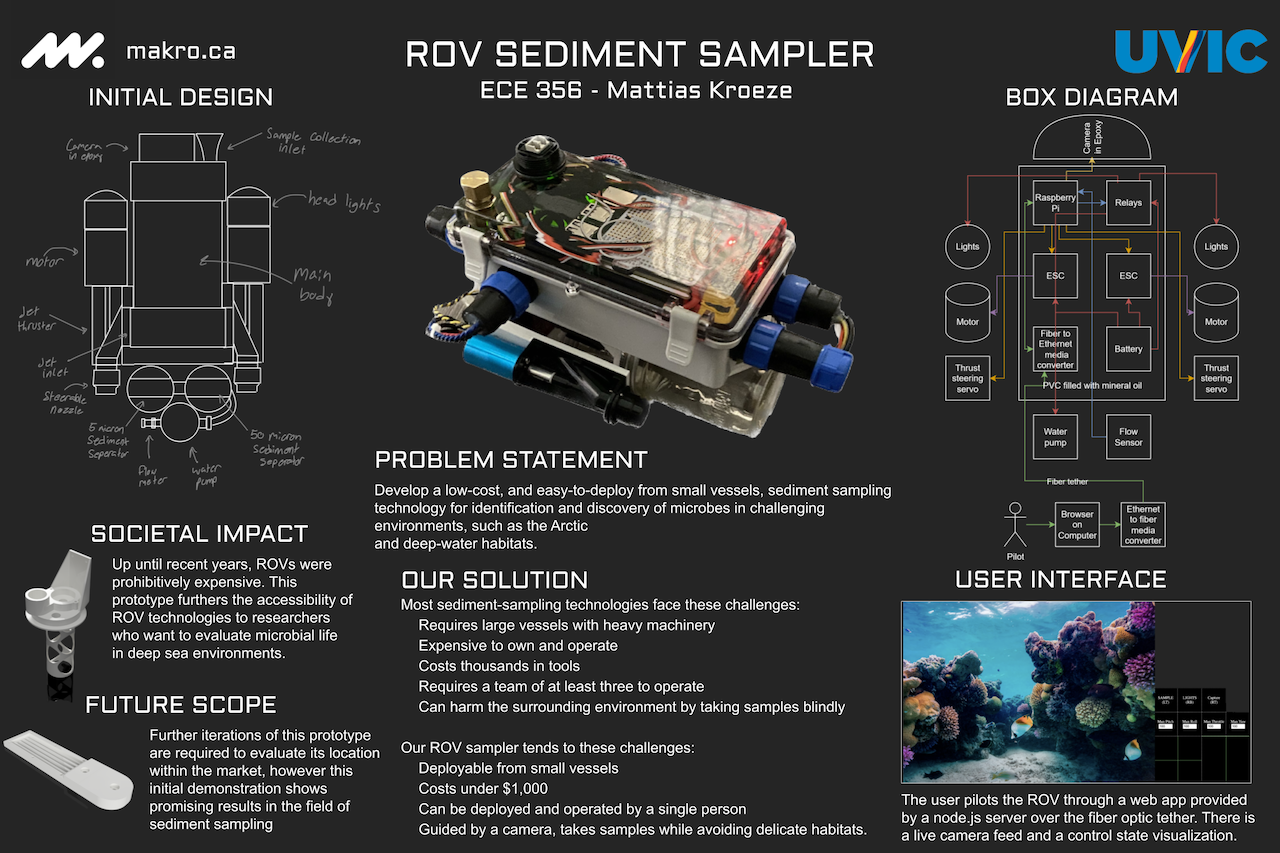



Problem Statement
Collecting sediment samples can be extremely informative in evaluating the health of a localized ecosystem. However, sampling from deep-water habitats can be prohibitively expensive and difficult. There are many high-value products to be derived from aquatic environments that can help create a sustainable aquaculture to feed the world’s growing population. To capitalize on this we were tasked with developing a low-cost, and easy to deploy from small vessels, sediment sampling technology for identification and discovery of microbes in challenging environments, such as the Arctic and deep-water habitats
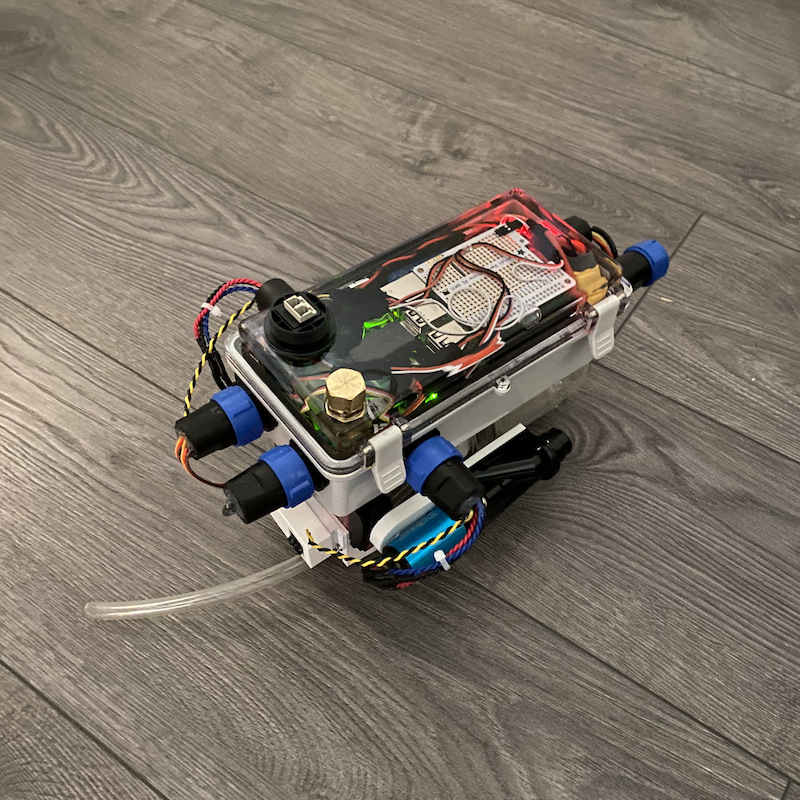
My Solution
I designed and constructed a remotely operated underwater vehicle (ROV) with sediment sampling capabilities. Users pilot the ROV with a standard gamepad while watching a live camera feed in a web app in a computer's browser. The user's computer is connected via fiber optic link to a Raspberry Pi within the ROV running a node.js server which provides the web app and receives control inputs via HTTP requests.
A more detailed description of the project, including a feasibility report as well as progress at each sprint of the project is available here.
Competition and Aftermath
On the day of the competition I won 1st place in both the demonstration and pitchIt categories, clinching the $800 grand prize.
In the weeks following this competition I was interviewed on CBC Radio on the topic of climate tech and the potential of this project
Need a problem solver?
Contact me with any opportunities at mattias.kro@gmail.com or reach me on LinkedIn
Grab a resume